基于模型的任務系統運行功能統一規范 導航定位系統運作
隨著人工智能與自動化技術的快速發展,基于模型的任務系統在各領域的應用日益廣泛,特別是在自動駕駛、機器人導航、智能物流等場景中。為確保這些復雜系統的可靠、高效與協同運行,制定一套統一的運行功能規范至關重要。本文聚焦于任務系統中的核心組成部分——導航定位系統的運作,探討其在統一規范框架下的設計原則、功能模塊、數據交互及安全保障。
一、規范目標與設計原則
基于模型的任務系統運行功能統一規范旨在實現跨平臺、跨場景的系統互操作性、可擴展性與可維護性。對于導航定位系統,其設計遵循以下核心原則:
- 標準化接口:定義統一的輸入輸出格式、通信協議與數據模型,確保不同廠商或開發團隊的組件能夠無縫集成。
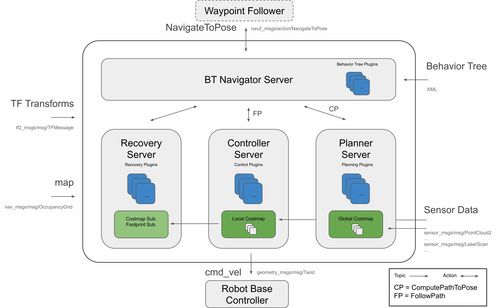
- 模塊化架構:將系統分解為感知、定位、規劃、控制等獨立模塊,各模塊通過標準接口交互,便于升級與故障隔離。
- 實時性與魯棒性:系統需在動態環境中實現毫秒級響應,并具備抗干擾能力,應對傳感器噪聲、信號遮擋等異常情況。
- 安全優先:嵌入多層安全機制,包括數據驗證、異常檢測與冗余備份,確保導航定位過程的安全可靠。
二、導航定位系統功能模塊規范
在統一規范下,導航定位系統的運作可劃分為以下關鍵模塊:
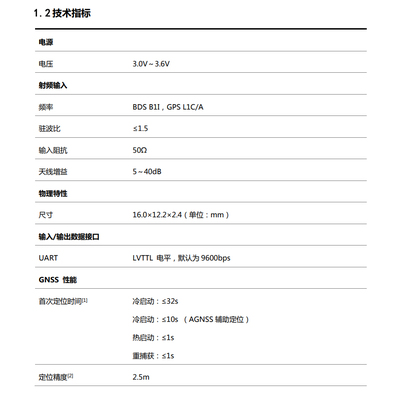
- 環境感知模塊:整合多傳感器數據(如激光雷達、攝像頭、IMU、GNSS),通過標準化數據格式(如點云、圖像、位姿信息)輸出環境特征。規范要求感知模塊具備時間同步與坐標系統一能力,減少數據融合誤差。
- 定位與建圖模塊:基于感知數據實現實時定位(如SLAM技術)與高精度地圖構建。規范規定定位結果需包含位置、姿態及置信度信息,并以通用坐標系(如世界坐標系)輸出;地圖數據需采用分層結構(如語義層、幾何層),支持動態更新。
- 路徑規劃模塊:根據任務目標與實時定位信息,生成全局與局部路徑。規范要求規劃算法遵循安全約束(如避障規則、交通法規),并提供多條備選路徑以增強靈活性。
- 運動控制模塊:將路徑指令轉化為執行器的控制信號(如速度、轉向角)。規范強調控制指令需平滑連續,并設置閾值防止超調或振蕩。
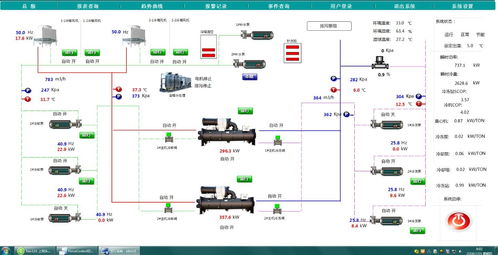
- 狀態監控與診斷模塊:實時監測系統各模塊的運行狀態,通過標準化日志與告警機制實現故障預警與根因分析。規范要求該模塊支持遠程診斷與健康管理。
三、數據交互與通信規范
為確保模塊間高效協作,規范對數據流與通信協議作出統一規定:
- 數據格式標準化:采用通用數據描述語言(如Protobuf、JSON Schema)定義傳輸內容,確保數據結構一致。例如,定位數據包需包含時間戳、坐標值、協方差矩陣等字段。
- 通信協議統一:推薦使用ROS 2、DDS等中間件支持實時發布/訂閱模式,并規定服務質量(QoS)策略,如數據可靠性、截止時間等參數。
- 接口抽象化:定義清晰的API接口,如“獲取定位信息”、“提交路徑請求”,降低模塊耦合度,便于第三方組件接入。
四、安全與合規性要求
導航定位系統常涉及人身與財產安全,規范特別強調以下方面:
- 功能安全:遵循ISO 26262等標準,設計故障檢測與容錯機制,如定位失效時自動切換至備用傳感器或進入安全狀態。
- 數據安全:對敏感數據(如高精度地圖、用戶軌跡)進行加密傳輸與存儲,并設置訪問權限控制。
- 法規符合性:系統需適配地區性法規,如在自動駕駛中符合當地交通管理部門的技術標準。
五、實施與驗證建議
為落實規范,建議采取分階段實施策略:先在小規模場景中試點,通過仿真測試驗證模塊功能;再逐步擴展至復雜環境,進行實車或實地測試。驗證過程需注重性能指標量化,如定位精度(厘米級)、規劃響應時間(<100ms)及系統可用性(>99.9%)。
基于模型的任務系統運行功能統一規范為導航定位系統的設計與集成提供了清晰框架。通過標準化模塊、數據流與安全措施,不僅能提升單個系統的性能,還能促進產業生態的協同創新。隨著技術進步與場景深化,規范需持續迭代,以適應更智能、更自主的導航定位需求,最終推動無人系統在工業、交通、民生等領域的規模化應用。
如若轉載,請注明出處:http://www.shengdeholdings.cn/product/4.html
更新時間:2026-05-18 06:59:52