遙感數據處理分析系統是現代地理信息科學與空間技術應用的核心工具,其數據處理環節是實現從原始遙感影像到有價值信息轉化的關鍵。數據處理不僅涉及技術流程的優化,更直接關系到最終分析結果的準確性與可靠性。本文將系統介紹遙感數據處理分析系統中數據處理的流程、核心技術與應用價值。
一、遙感數據處理的基本流程
遙感數據處理通常遵循一套標準化的流程,以確保數據質量和分析效率。該流程主要包括數據獲取、預處理、信息提取與分析應用四大階段。
- 數據獲取與輸入:系統首先從各類遙感平臺(如衛星、無人機、航空攝影)接收原始數據,常見格式包括多光譜、高光譜、雷達影像等。數據輸入時需進行格式標準化和元數據校驗,確保后續處理的兼容性。
- 數據預處理:這是數據處理的核心環節,旨在消除原始數據中的誤差和噪聲,提高數據的可用性。預處理通常包括:
- 輻射定標:將傳感器記錄的數值轉換為實際物理量(如反射率、輻射亮度)。
- 大氣校正:消除大氣散射、吸收等影響,獲取地表真實反射特性。
- 幾何校正:糾正因傳感器姿態、地形起伏等引起的幾何畸變,包括系統級校正和基于地面控制點的精校正。
- 圖像融合與增強:通過全色與多光譜影像融合提高空間分辨率,或利用濾波、變換等方法增強目標特征。
- 信息提取:基于預處理后的數據,采用自動化或半自動化方法提取感興趣的信息。關鍵技術包括:
- 分類識別:利用監督分類(如支持向量機、隨機森林)或非監督分類方法,區分土地覆蓋類型、植被種類等。
- 變化檢測:通過多時相影像對比,監測地表變化(如城市擴張、森林砍伐)。
- 特征反演:基于物理模型或統計方法,反演地表溫度、植被指數、水體污染程度等參數。
- 分析應用:將提取的信息與地理信息系統(GIS)、人工智能模型結合,服務于具體應用場景,如環境監測、農業估產、災害評估、城市規劃等。
二、數據處理的核心技術
- 云計算與并行處理:面對海量遙感數據,現代系統依托云計算平臺實現分布式存儲與并行計算,大幅提升處理效率。例如,基于Spark或Hadoop框架的影像處理可縮短大規模數據分析時間。
- 人工智能融合:深度學習技術(如卷積神經網絡)在圖像分類、目標檢測中表現突出,能夠自動學習特征,減少人工干預。例如,U-Net網絡可用于高精度地物分割,提升信息提取自動化水平。
- 多源數據融合:結合遙感數據與其他數據源(如氣象數據、社交媒體數據),通過數據同化技術生成更全面的分析結果。雷達與光學影像的融合還能克服云層遮擋問題,實現全天候監測。
三、應用價值與挑戰
遙感數據處理分析系統已廣泛應用于多個領域:
- 環境保護:實時監測大氣污染、水體富營養化,評估生態系統健康。
- 精準農業:通過植被指數分析作物長勢,指導灌溉與施肥決策。
- 災害管理:利用變化檢測技術評估洪澇、地震后的受災范圍,輔助救援資源調配。
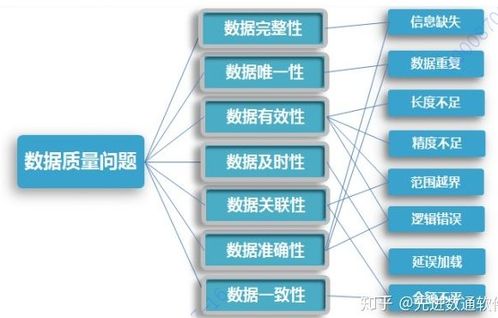
數據處理仍面臨挑戰:數據質量受天氣、傳感器限制;算法泛化能力不足;處理流程的標準化與自動化仍需完善。隨著邊緣計算、量子計算等技術的發展,遙感數據處理將向實時化、智能化方向演進,為可持續發展提供更強大的空間信息支撐。
遙感數據處理分析系統的數據處理環節是連接原始數據與現實應用的橋梁。通過不斷優化流程、融合前沿技術,該系統正推動遙感技術從“看得見”向“看得懂”“用得巧”跨越,成為數字地球建設不可或缺的組成部分。